Gimbal do kamery termowizyjnej i noktowizyjnej




Cena regularna:
towar niedostępny
 Opis
Opis
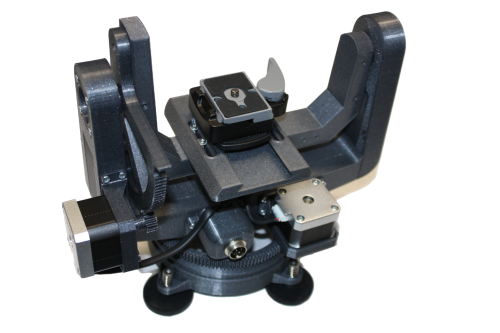
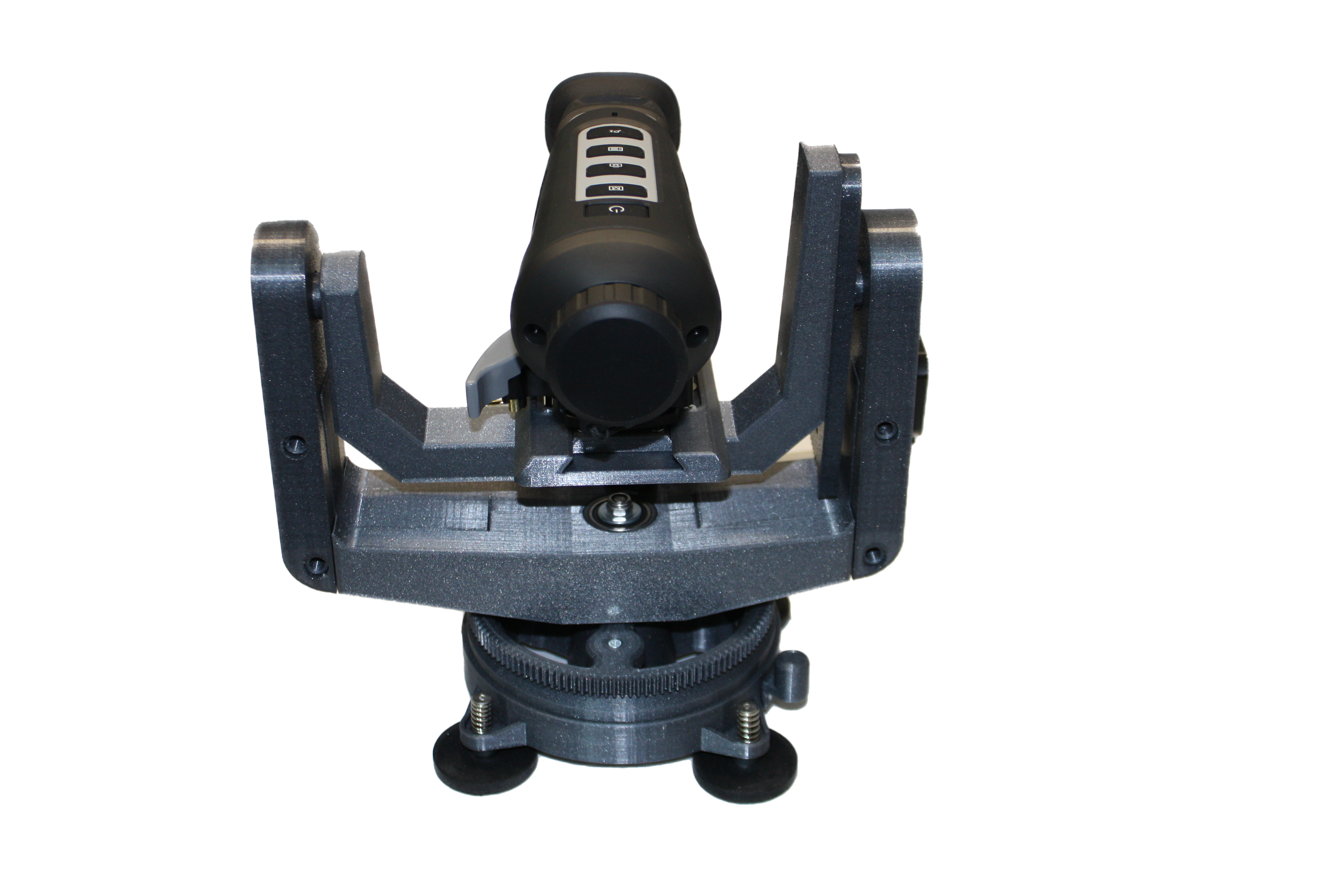
Gimbal do kamery termowizyjnej i noktowizyjnej
Gimbal do kamery termowizyjnej i noktowizyjnej jest nowością na rynku. Gimbal został stworzony w technologii druku 3d z materiału o nazwie Petg, który posiada właściwości mechaniczne zbliżone do ABS-u. Napęd gimbala stanowią silniki krokowe sterowane za pomocą układu Arduino zasilanego prądem stałym o napięciu 12V doprowadzanym przewodem od gniazda zapalniczki samochodowej. Sterowanie gimbalem odbywa się za pomocą joysticka, którym nadajemy gimbalowi kierunek oraz prędkość obrotu (lewo-prawo, góra-dół). Joystick posiada wbudowany potencjometr i stopień jego odchylenia nadaje gimbalowi proporcjonalną do tej wartości prędkość obrotu lub wychylenia. Urządzenie posiada funkcję auto-skanowania dzięki czemu gimbal bez konieczności sterowania joystickiem będzie sam skanował obszar lewo-prawo w czasie zadanym przez użytkownika. W trybie auto-skanowania gimbal obraca się ze stałą fabrycznie zaprogramowaną prędkością w czasie, który można dowolnie zmieniać (dłuższy czas odpowiada większemu kątowi obrotu). Zaprogramowanie trybu auto-skanowania polega na naciśnięciu i przytrzymaniu joysticka co spowoduje powolny obrót gimbala w lewo do czasu, w którym puścimy joystick. Komputer urządzenia zapamięta czas przez który wciśnięty był joystick i przez taki okres czasu będzie wykonywał naprzemiennie obrót lewo-prawo. Wyjście z trybu auto-skanowania odbywa się poprzez krótkie naciśniecie joysticka. Ponowne krótkie naciśnięcie joysticka spowoduje załączenie auto-skanowania z zaprogramowanym uprzednio czasem skanowania.
Funkcja auto-skanowania jest polecana w sytuacjach gdy zależy nam na stałej obserwacji konkretnego rewiru (poletka, zasiewu, itp.), gdzie pole widzenia urządzenia będącego w spoczynku nie obejmuje całości terenu, na którego obserwacji nam zależy, przez co użytkownik zmuszony jest ręcznie nakierowywać urządzenie na taki obszar.
Gimbal służy do montażu urządzeń obserwacyjnych takich jak kamery, urządzenia nokto- i termowizyjne.
Podstawa gimbala zaopatrzona jest w 4 magnesy powlekane gumą o udźwigu ok 7 kg każdy, przez co gimbal można umieścić na powierzchniach metalowych, tj. dach oraz pokrywa silnika samochodu, powodując jego unieruchomienie w stopniu zapobiegającym przewrócenie lub zsunięcie.
Jazda pojazdem z założonym na pojeździe gimbalem jest zabroniona i odbywa się na własne ryzyko użytkownika! Producent lub sprzedawca nie ponosi odpowiedzialności za ewentualne szkody materialne powstałe podczas wykorzystania sprzętu w czasie jazdy. W czasie jazdy z założonym na dach lub inne elementy nadwozia gimbalem mogą nastąpić sytuacje losowe powodujące, np. konieczność nagłego hamowania pojazdu lub wjechanie w nierówność na drodze, co spowoduje duże przeciążenia mogące skutkować odczepieniem się gimbala lub jego uszkodzeniem.
Transfer obrazu z urządzenia zamontowanego na gimbalu z odbiornikiem, np. tabletem lub telefonem komórkowym odbywa się za pomocą komunikacji bezprzewodowej, w które powinno być zaopatrzone urządzenie, które zamierzamy wykorzystać do obserwacji terenu i jest to całkowicie niezależny układ od pracy gimbala.
Koszty dostawy
Cena nie zawiera ewentualnych kosztów płatności
Produkty powiązane
Kamera termowizyjna termowizor HIKMICRO Lynx LE15S

Guide Track IR25

Guide Track IR50

HIKVISION Lynx Pro LH19

HIKVISION Lynx Pro LH25

Kamera termowizyjna HIKVISION Lynx Pro LH15


Monokular termowizyjny OQ35

Termowizor InfiRay Eye Series V2.0 Xeye c2w

